デバイスの種類と精度を格段にアップ!
最近のバイクには、ライダーをサポートする様々な電子デバイスが装備されている。……が、きちんとライダーを手助けするには「いま、ライダーが何をしたくて、バイクがどんな状態にあるのか?」を、バイク自身が正確に把握することが重要だ。
そのなかで「ライダーが何をしたいか?」は、スロットルやブレーキ、シフトチェンジなどの操作で、ある程度は判断できる(後に解説するライド・バイ・ワイヤ装備車ならスロットルの開け閉め具合、ABS装着車ならブレーキのかけ具合が正確に分かる)。とはいえ、スロットルを急開していれば思い切り加速したいし、強くブレーキをかけていれば急減速したいのだろう、というくらいだ。
そして「バイクがどんな状態か?」については、従来はスピードとエンジン回転数、使っているギヤの段数、前後タイヤの回転数くらい。これだけの情報では、真っすぐ走っている時はともかくとして、ライダーがもっともサポートしてもらいたい(イヤな言い方をすれば、もっとも転倒しやすい)シーンであるコーナリングを手助けするのは難しいハズだ。
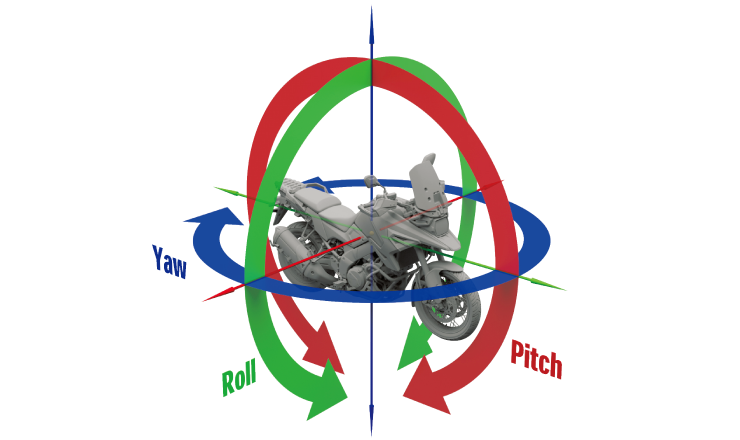
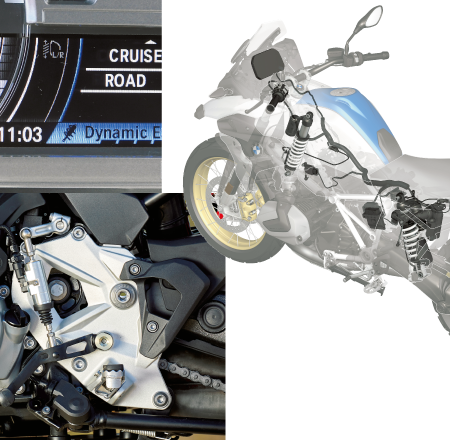
そこで登場したのがIMU(イナーシャル・メジャーメント・ユニット)=慣性計測装置。難しい仕組みはともかく、上に解説するように「いまバイクがどんな状態にあるか」を検知する装置だ。
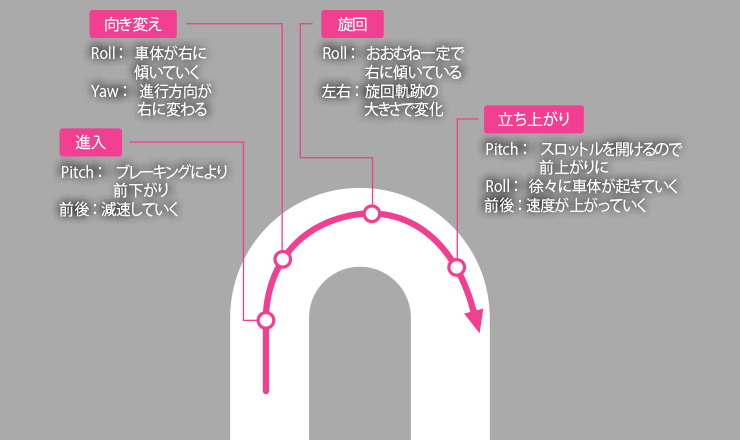
当然ながら、直線走行で車体が直立している状態と、カーブで深くバンクして旋回している状態では、安定性やスリップする危険率は異なる。だからIMUが装備されていてバイクの状態が正確に分かれば、トラクションコントロールやコーナリングABSなどの電子デバイスも、その状態・状況に応じた緻密な制御(適切なサポート)が可能になるワケだ。
また最新の電子制御サスペンションは、走行状態やライダーの操作に対してリアルタイムで減衰状態などが変化していく“セミアクティブ”だが、コレなどは常に“バイクの姿勢”を把握していなければ(要するにIMUが装備されていなければ)実現できないメカニズムの最たるモノ。他にも坂道発進をサポートする「ヒルスタートシステム」も、坂道に停車しているコトを判断できるから機能するワケだ。
だからIMUは、スポーティな走行はもちろん、安全や快適性の向上に、もはやなくてはならないアイテムと言えるだろう。